

- By YIKONG
- 2025-03-10 14:25:58
- 기술 지원
AGV 제동거리 계산 및 평가
"AGV 서스펜션 및 제동 토크 계산 및 평가" 기사에서는 AGV의 스티어링 휠에 필요한 관성력, 제동 토크, 양압을 계산하는 방법을 소개했습니다. 오늘은 AGV의 비상 제동 시 제동 거리를 계산하고 평가하는 방법을 소개합니다.
우리가 평가하는 것은 비상 정지 버튼이 눌리고 잠긴 후 AGV의 이동 거리입니다. 비상 정지 버튼을 누른 후 전체 제동 시스템의 반응 시간 내에서의 반응 거리와 잠금 후 관성의 영향으로 인한 AGV의 슬라이딩 거리라는 두 단계로 분석할 수 있습니다. 다음 그림과 같이:
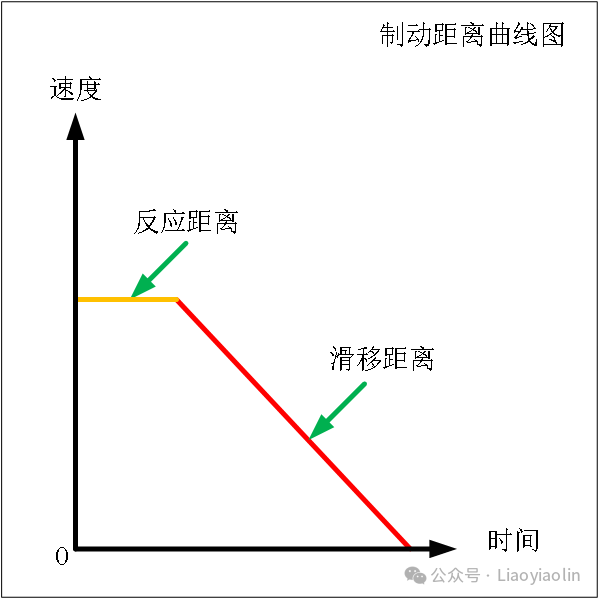
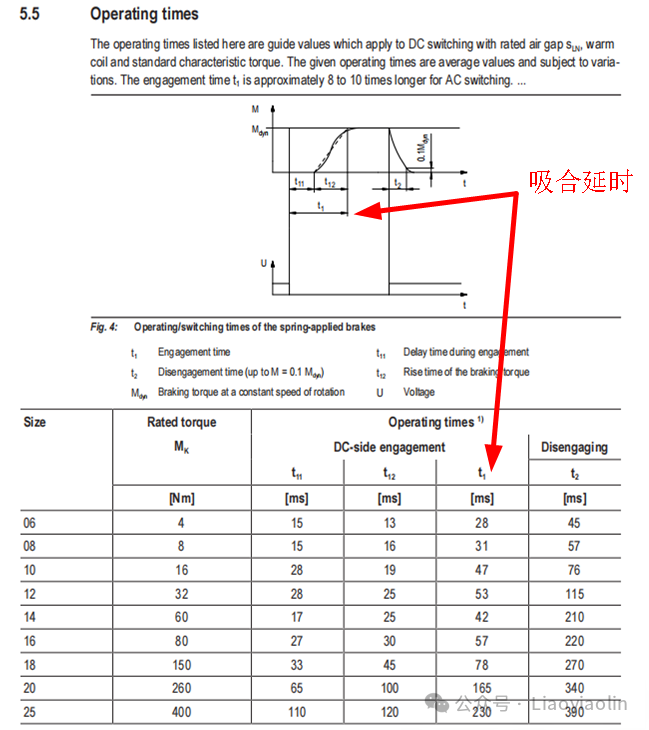
다음으로 반응 거리에 대해 논의해보겠습니다. 반응 거리는 비상 정지 버튼이 눌리고 제어 시스템에 의해 처리된 순간부터 브레이크가 완전히 잠길 때까지 AGV 차량의 변위 거리를 말합니다. 주요 매개변수에는 비상 정지 시의 작동 속도와 전체 제동 시스템의 반응 시간이 포함됩니다. 아래 그림은 특정 브랜드의 브레이크 작동 순서 매개변수를 나타낸 다이어그램입니다. 우리는 사용된 스티어링 휠 모델에 따른 표를 통해 브레이크 결합 지연 시간을 알아내야 합니다.
브레이크의 전원 공급을 중간 릴레이로 제어하는 경우, 중간 릴레이의 지연 시간을 수십 밀리초 단위로 추가할 수도 있고, 실제로 사용하는 중간 릴레이의 매뉴얼에서 지연 시간을 직접 확인할 수도 있습니다. 운전자가 직접 제어하는 경우 무시해도 됩니다. 계산 예제를 평가하기 편리하게 하기 위해, 제동 시스템의 반응 시간을 100ms 또는 0.1s로 하여 평가합니다. 동시에 AGV 차량이 1m/s의 속도로 긴급 제동을 한다고 가정할 때, AGV 차량의 제동 반응 거리는 다음과 같이 측정된다.
반응거리 = vt = 1m/s*0.1s = 0.1m
브레이크가 완전히 잠긴 후, AGV의 미끄러짐 거리는 바퀴와 지면 사이의 마찰 계수와 감속과 관련이 있습니다. 바퀴와 지면 사이의 종합 마찰 계수를 0.2로 가정하면, 미끄러짐 거리는 다음과 같습니다.
미끄러짐 거리 = v²/(2μg) = 1*1/(2*0.2*10) = 0.25m
AGV의 총 제동 거리는 다음과 같습니다.
제동거리 = 반응거리 + 미끄러짐거리 = 0.1 + 0.25 = 0.35m
요약:
본 논문에서는 AGV의 제동거리 계산방법을 소개한다. 계산 과정을 통해 비상 제동 거리의 반응 거리는 제동 시 속도와 전체 제동 시스템의 지연 시간과 양의 상관 관계를 갖는 것을 알 수 있습니다. 미끄러짐 거리는 제동 시 초기 속도와 양의 상관관계를 갖고, 마찰 계수와 음의 상관관계를 갖습니다. 직장에서 가장 중요한 것은 구체적인 문제를 구체적으로 분석하는 것입니다. 기사의 특정 내용을 문맥에서 벗어나 그대로 인용하거나 적용하지 마십시오.