

- By YIKONG
- 2025-03-10 14:32:09
- 기술 지원
AGV 현장 데이터 분석 - 스티어링 휠 모니터링 및 유지 관리
1. 디버깅 배경 및 제품 정보:
디버깅 사이트: 터미널 사이트의 자동차 조립 작업장 생산 라인;
시험기 : AGV 차량 1호, 2호, 8호
스티어링 휠 모터 매개변수: MRT20.0142 정격 전력 1000W, 정격 전압 48VDC, 정격 전류 26A, 피크 전류 70A, 정격 속도 1700RPM, 최대 작동 온도 110도;
드라이버 매개변수: 최대 전압 60VDC, 정격 전류 60A; 최대 전류 120A 최대 작동 온도 85도
AGV 1호의 견인 모터에서 연기가 나기 시작했습니다.
2. AGV 1호, 2호, 8호의 모니터링 데이터 요약:
3. 정상운영 모니터링 데이터의 사전 분석:
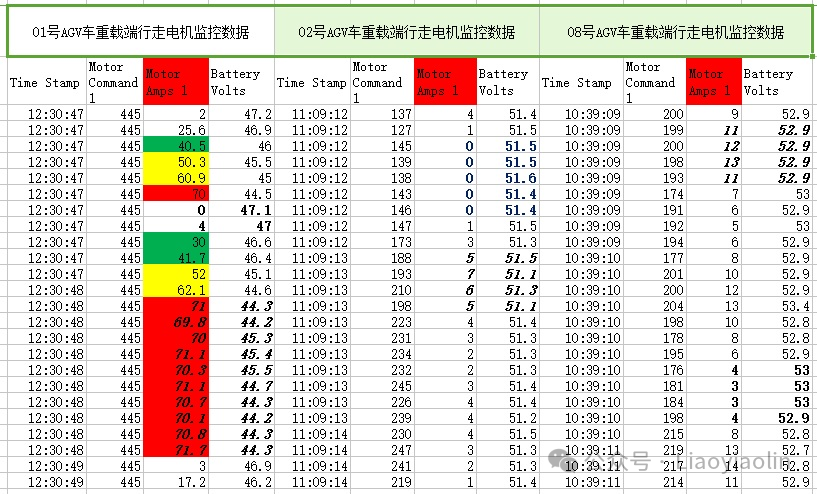
모니터링 데이터 테이블 요약을 통해, 일반적인 직선 주행 시 모터 전류가 수 암페어에서 10암페어 이상 사이에서 변동하는 것을 발견했는데, 이는 이때 모터의 실제 부하율이 50% 미만임을 의미하며, 모터와 드라이버 선정이 직선 운전 요구 사항을 충족함을 나타냅니다.
모니터링 데이터 테이블 요약을 통해 차체가 옆으로 움직일 때 최대 전류 피크는 70A에 도달할 수 있으며(이 매개변수는 운전자가 설정), 정상 지속 시간은 2초 미만인 것으로 나타났습니다. 이는 모터와 드라이버 선택이 횡방향 이동의 요구 사항을 충족한다는 것을 나타냅니다.
데이터 요약 표를 보면 정상 작동 중에 배터리 전압이 모터 전류에 미치는 영향이 매우 중요하다는 것을 쉽게 알 수 있습니다. 배터리 전압이 48V보다 낮으면 모터는 측면 이동 순간에 부하를 끌 수 있을 만큼 큰 토크를 출력하여 출력 전류가 급격히 증가합니다. 이처럼 낮은 전압의 혹독한 작업 조건에서도 모터 과부하는 최소화되어, 모터와 드라이브가 측면 이동 조건에서 최대 전력 출력을 감당하기에 충분함을 보여줍니다.
정상 작동 시 3개 모터의 데이터를 모니터링한다는 전제 하에, 모터는 정상적인 상황에서는 과열되지 않습니다. 이 지점에서는 후속 디버깅 및 생산 과정에서 검사를 위해 온도 적외선 총을 사용할 수 있습니다. AGV차량이 20분 이상 연속적으로 운행될 경우(모터의 열평형시간 정도), 적외선 총으로 측정한 최고 온도 데이터와 5~10도(모터 권선에서 케이싱까지의 열전달 온도차 정도)를 더한 값이 실제 모터 권선의 온도와 거의 일치합니다. 값이 110도 이하이면 장시간 안정적으로 작동할 수 있습니다. AGV 1호의 모터에서 두 번이나 연기가 발생했지만, 이후의 시험 운행에서는 이상이 발생하지 않아 모터 성능은 여전히 신뢰할 수 있음을 확인했습니다.
4. AGV 1호기 운전 중 공장 모터 1대의 이상 및 과열(연기) 발생 분석:
현존하는 조건 하에서는 공장 이상이 있는 모터의 관련 데이터를 시험하는 것이 불가능하므로 분석 및 판단의 전제 조건을 충족하지 못하므로 여기서는 생략한다. 운전 중 과열되는 모터는 다음과 같이 분석되며, 그 가능성은 다음과 같습니다.
1. 모터가 멈췄습니다. 가능한 이유 중 하나는 브레이크가 완전히 풀리지 않아 모터에 과부하가 걸리는 것입니다.
2. 두 모터의 속도가 동기화되지 않아 "정면 충돌"이나 "줄다리기" 현상이 발생하여 모터에 과부하가 발생합니다.
3. 지면 장애물로 인해 바퀴가 끼고 모터가 멈췄습니다. 일정 시간 동안 비상 정지 상태가 지속된 후, AGV 차량은 스스로 주행하여 비정상적인 상황을 제거하고 이동했습니다.
4. 두 구동 바퀴의 주행 방향이 동일한 직선, 평행선 또는 동심원 호 궤적 상에 있지 않아 두 모터의 합력이 감소하고 과부하가 발생합니다. AGV가 1m 이상 직선 주행한 후 연기를 냈으므로 이러한 비정상적 상황도 배제됩니다.
5. 배터리 출력 전력이 부족하여 모터 전류가 증가하고, 이로 인해 모터가 과열됩니다. 이 현상은 이후의 테스트에서 배터리 에너지 저장의 심각한 부족으로 확인되었습니다. 이후 실시한 테스트에서도 AGV 1호의 배터리 에너지 저장량이 부족한 것으로 드러났습니다.
6. 드라이버 매개변수 설정이 부적절하거나 오류가 발생하면 모터 전류가 제어되지 않아 적절한 보호 없이 과도한 모터 전류가 발생합니다. 참고: 이런 상황은 드라이브가 모터보다 훨씬 클 때 발생할 가능성이 더 높습니다.
7. 모터에 내장된 온도 보호 기능이 없거나 사용되지 않습니다.
8. 상기 분석에 따르면 모터 과부하를 유발하는 것으로 확인된 원인은 다음과 같습니다. 모터 온도 보호 기능을 사용하지 않음; 드라이버의 저전압 및 전류 제한 보호 기능이 사용되지 않습니다. 배터리의 에너지 저장량이 심각하게 부족합니다. AGV 1호의 모터에서 연기가 나는 주된 이유는 위의 세 가지 요인이 동시에 발생했기 때문일 것입니다. 세 가지 요소 중 하나라도 제거하면 모터가 과부하되어 연기가 나지 않습니다.
5. 치료 방법 또는 제안:

1. 드라이버 저전압은 44~45V로 설정됩니다. 배터리의 에너지 저장량이 부족하면 모터 속도가 감소하고 출력 전류도 감소합니다(이 보호 메커니즘은 드라이버에 의해 고정되며 재설정할 수 없습니다). 즉, 배터리 전압이 부족하면 AGV는 운전자, 모터, 배터리 팩을 보호하기 위해 천천히 작동하다가 정지합니다.
참고: 모터에서 연기가 나기 전에는 일부 AGV 차량에 이 보호 기능이 설정되어 있지 않습니다. 이후 디버깅 및 운영 시 적절한 설정을 하는 것이 좋습니다.
2. 드라이버의 전류 제한 보호 범위는 합리적으로 설정되어야 합니다. 현재 설정은 70A 피크 전류 제한, 44A 전류 제한 보호 및 5000ms 지연 보호입니다. 출력 전류가 44A를 초과하고 5000ms 동안 지속되면 드라이버는 다시 작동 명령을 받을 때까지 출력을 차단합니다.
참고 1: 모터에서 연기가 나기 전에 일부 AGV 차량에는 이 보호 기능이 설정되어 있지 않습니다! 이후 디버깅 및 운영 시 적절한 설정을 하는 것이 좋습니다.
참고 2: 피크 전류, 전류 제한 보호, 지연 시간과 같은 매개변수는 이후 실제 작업에서 조정 및 최적화할 수 있습니다.
3. 모터 온도 보호 기능이 사용되지 않습니다. 모터에서 연기가 나기 전에는 모터 과열 신호가 사용되지 않습니다. 모터를 과열로부터 효과적으로 보호하려면 이 기능을 사용하는 것이 좋습니다.
4. 네 번째 분석의 1번 항목에 대해서는 당시의 상황을 재현하거나 복구할 수 없습니다. 기계가 진동한 후에는 접촉 불량이나 느슨함이 없는지 다시 한번 점검하여 확인하는 것이 좋습니다. 2번 항목에 대해서는, 당시의 상황은 재현되거나 복원될 수 없습니다. 상위 컴퓨터 시스템을 통해 두 모터의 속도 일관성을 모니터링하고 직선 운전의 속도 차이가 너무 클 경우 적절한 시기에 개입하는 것이 좋습니다. 4번 항목에서 언급한 구동 휠의 주행 궤적 문제에 대해서는 후속 디버깅 시 구동 휠의 주행 궤적이나 추세의 일관성을 최적화하는 것이 필요합니다. 5번 항목의 경우, 배터리 에너지 저장량이 감소하면 AGV 차량의 정상적이고 지속적인 작동을 보장하기 위해 적절한 시기에 전기를 충전하고 보충하는 것이 좋습니다.